Il s'agit de détecter l'interruption ou la présence d'un signal lumineux, de façon fiable. L'application typique est un dispositif qui détecte un objet (ou un animal) lors de la fermeture d'un portail roulant ou d'un volet roulant, ou un dispositif qui détecte la présence d'un objet à proximité comme un robinet qui s'ouvre tout seul lorsqu'on approche les mains.
Le choix se porte rapidement sur de l'infra rouge modulé pour les raisons suivantes : filtrage facilement possible, chaine de réception plus facile à réaliser, très faible coût des modules et des diodes IR disponibles, et des modules de réception faible coût tout prêt. On pourrait imaginer utiliser des diodes lasers et des récepteurs collimatés, mais le prix, la fiabilité et la difficulté de réglage de ces dispositifs sont rédhibitoires.
Ces dispositifs sont plutôt à l'intérieur (reflexion), soit à l'exterieur (transmission).
Pour éviter d' être trop sensible à la lumière ambiante que peut être forte en intensité (extérieur), ou modulée fortement par le secteur 50Hz (éclairage intérieur), il ne faut pas utiliser une émission continue, mais plutôt une émission par porteuse. Le récepteur peut alors être accordé sur la fréquence d'émission et on atteint des sensibilités importantes.
C'est le principe utilisé par les télécommandes IR, on a ainsi accès à de nombreux types de composants à condition d'adopter la même fréquence de fonctionnement (30-40 kHz).
Normalement obturé (obscur) : ce sont des applications très courantes.
|
 |
Normalement passant (éclairé) avec un catadioptre :
Dans les deux cas, et vu que l'émission et la réception sont faites par le même boitier, il est facile de concevoir la réception de façon synchrone de l'émission. Autrement dit, le récepteur peut savoir quand l'émission a lieu, et çà change tout.
Normalement obturé (obscur) :
Normalement passant (éclairé) :
La solution la plus saine est basée sur des émetteur/récepteurs séparés, au prix d'un câble entre la gestion et l'élément déporté, ou de 2 cables. Deux architectures sont possibles selon que la réception et le traitement est fait de façon synchrone avec l'émission ou pas :


| Reflexion, un seul boitier | Transmission, 2 boitiers | |
| Asynchrone | pas d'interet par rapport au synchrone | meilleur en extèrieur, transmission continue, très faible rapport cyclique (1%), longue portée, fréquence de l'ordre du kHz |
| Synchrone | meilleur en intérieur, transmission par burst, utilisation de modules intégrés IR 36kHz, faible portée | pas d'interet par rapport à l'asynchrone |
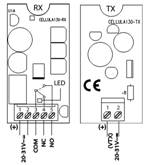
 Analyse barrière BFT Cellula 130
Analyse barrière BFT Cellula 130Un bon exemple de barrière luminseuse sont les cellules BFT Cellula 130 qu'on peut acquérir autour de 35€ la paire en cherchant bien.
 |
 |
 |
Spécifications :
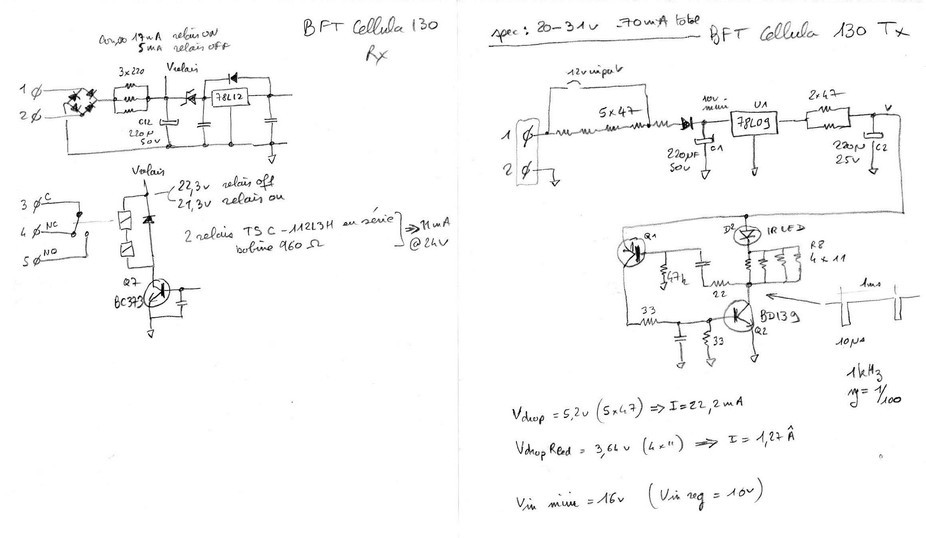
Ce qui surprend de suite, c'est le très faible rapport cyclique utilisé, de façon à monter le courant LED IR au delà d'un ampère sans gros impact sur la consommation totale moyenne. La fréquence utilisée est basse (1kHz), assez loin des transmission télécommande IR (33/36 kHz), le récepteur est réalisé en analogique avec des transistors.
L'émetteur pourrait être sensiblement amélioré. Ici le NPN BD139 est utilisé en limite, il présente un Vce sat très supérieur à 2 Volts, et très dépendant de la température. Le même schéma avec un hexfet serait sans aucun doute beaucoup plus stable.
On peut alimenter ces cellules en 12V à condition de faire un peu de modifications.
Pour l'émetteur on shunte les 5 résistances amont et le tour est joué. Cet émetteur fonctionne alors à partir de 7V jusqu'au delà de 18V sans problème majeur de dissipation. La fréquence est extremement stable, elle passe de 1.058 kHz@7V à 1.047kHz@12V.
Pour le récepteur, le régulateur est un 78L12 et il faut commencer par le changer par un 78L09. Puis on court circuite la zener en amont du régulateur, puis les résistances de 220Ohms, puis on enleve le pont de diode integré et on en remet une simple sur la ligne +V, et enfin, on déssoude un des 2 relais et on met des cavaliers en place de sa bobine et de son contact travail.
Evidemment, La consommation sous 12V ne change pas, elle est 16mA pour le récepteur et 22mA pour l'émetteur.
La réception par
module intégré (télécommande IR)Une solution très efficace consiste à utiliser des modules spécialisés pour les télécommandes IR genre TSOP ou SFH, qui s'alimentent sous 5V et offrent une sensibilité remarquable, parce que basé sur une émission IR modulée entre 30 et 56kHz.
Le plus simple et direct est d'utiliser un récepteur intégré destiné aux télécommandes IR du genre TSOP17xx de VISHAY (ex TEMIC ex TELEFUNKEN). Ces récepteurs existent pour les fréquences 30kHz, 33kHz, 36kHz, 36.7kHz, 38kHz, 40kHz, 56kHz, la version la plus courante étant celle à 36 kHz fréquence utilisée par les télécommande IR à protocole RC5. Aux US, c'est du 40kHz.
TSOP17xxx, SFH506, TFMS5xx0  |
TSOP18xxx, SFH5110 |
Les modules intégrés grand public TSOP17 ou 18, SFH506/5110 ou TSM55 utilisent tous la longueur d'onde à 950nm, pas d'autre choix possible.
Le signal de sortie est de type digital, dans tous ces détecteurs, la sortie est inversée et passe à 0 si une porteuse est reçue.
Attention, la sortie est sur pullup de forte valeur, donc sensible aux parasites. Le constructeur recommande de monter un pullup externe de 10k, ce qui augmente la consommation. Une capa de 100pF à 330pF en parallèle sur la sortie doit être tolérable et amener le même effet.
Si ces modules offre une solution très intégrée, ils sont aussi particulier exigeants sur la forme d'onde.
 |
La durée d'un burst doit être supérieure à 10 périodes de la porteuse.
La durée du silence est d'au moins 14 périodes, et ce parametre est très important. La sensibilité se dégrade fortement avec un signal IR continus. Le signal de sortie dure la durée du burst +/- 6 périodes. Le signal de test standard est constitué par un burst de 600µs ((18 périodes à 30kHz ou 24 périodes à 40kHz) suivi par un silence équivalent. Enfin, et ce n'est pas spécifié, le rapport cyclique du signal IR est lui aussi important. il doit être idéallement entre 25 et 75%. Les modules intégrés ne réagissent pas correctement à des signaux IR à très faible rapport cyclique comme 10% et en dessous. Finalement ces modules sont très bien pour des liaisons ou barrières lumineuses de portée faible (max ~5m), en intérieur. |
La réception par
circuit personnaliséLorsqu'on veut utiliser un rapport cyclique très faible, pour faire des longues distances par exemple, ou bien lorsqu'on ne peut pas utiliser une fréquence 30-40kHz, il faut passer à une solution discrete.
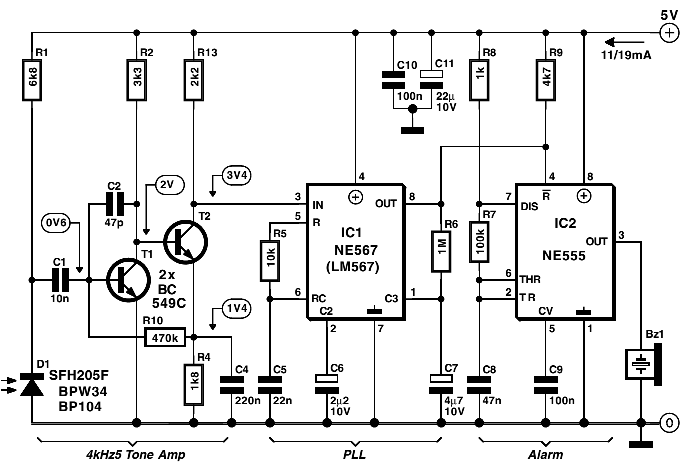
Nous voilà revenu aux temps héroiques des premières télécommandes IR où on réalisait des récepteurs avec des TCA440 ou TDA4050B (voir http://www.selfcontrol.cz/ele/infra.html). Ces circuits obsolètes s'alimentent sous 9-16V et consomment beaucoup. On peut aussi utiliser des PLL (voir Elektor 265), le LM567 offre une très bonne sensibilité, on peut aussi tout faire en discret (Cf BFT Cellula 130).
| Le capteur est typiquement une cellule BP104 offrant une
surface de 7.5mm² (certaines versions dont la version CMS est un peu
plus petite avec 4.4mm²) et un filtre IR intégré, centré sur 950nm.
La sensibilité est excellente, >40µA sous 1mW/cm² et 5V de polarisation inverse. Le courant inverse en obscurité est de l'ordre de qq nA, fortement dépendant de la température. Compter 30nA @60°C. La capacité parasite est de l'ordre de 25pF sous 5V inverse, mais plus de 50pF à 0V, ce qui conditionne les temps de monté/descente de 100ns. |
 |
 |
Sous un éclairage fort (exterieur plein soleil, ou interieur sous une lampe), la cellule peut fournir plus de 100µA continu, entaché d'une composante à 100Hz non négligeable dans le cas intérieur. La dynamique est énorme, car le petit signal utile que nous cherchons est de l'ordre du µA.
Dans de telles conditions, inutiles d'imaginer charger la cellule avec une résistance de 1Meg par exemple, il faut une charge qui différencie le continu et le signal utile alternatif, typiquement une inductance. Puis il faudra éliminer le 100Hz résiduel avec un filtre passe bande.
Si la fréquence du signal utile est autour de qq kHz, et que l'on souhaite une charge de l'ordre de qq 100 kOhms à cette fréquence, un rapide calcul montre qu'il nous faudrait une inductance énorme, de plusieurs Henry. Impossible.
 |
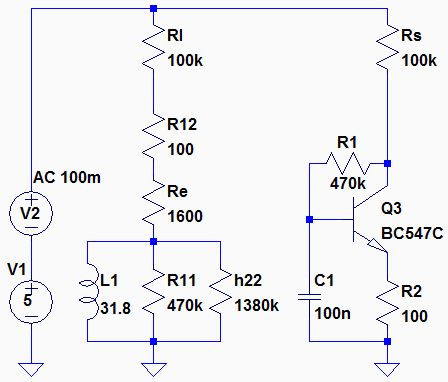
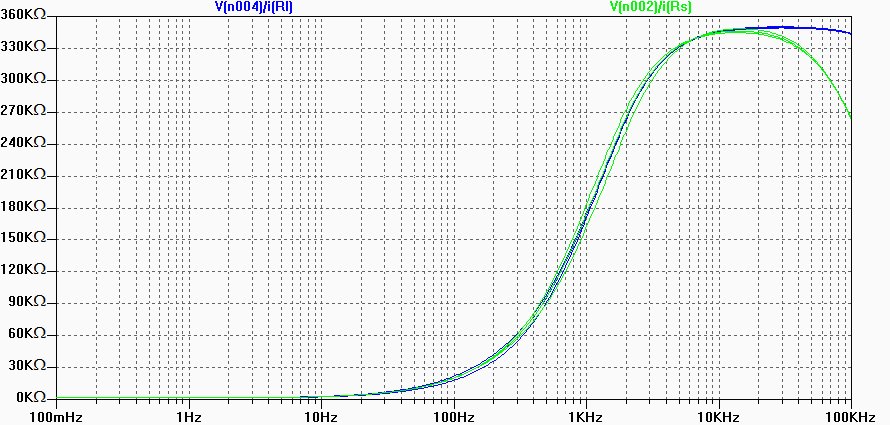
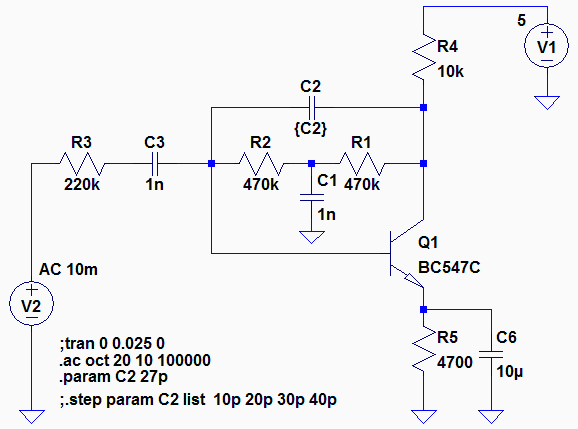
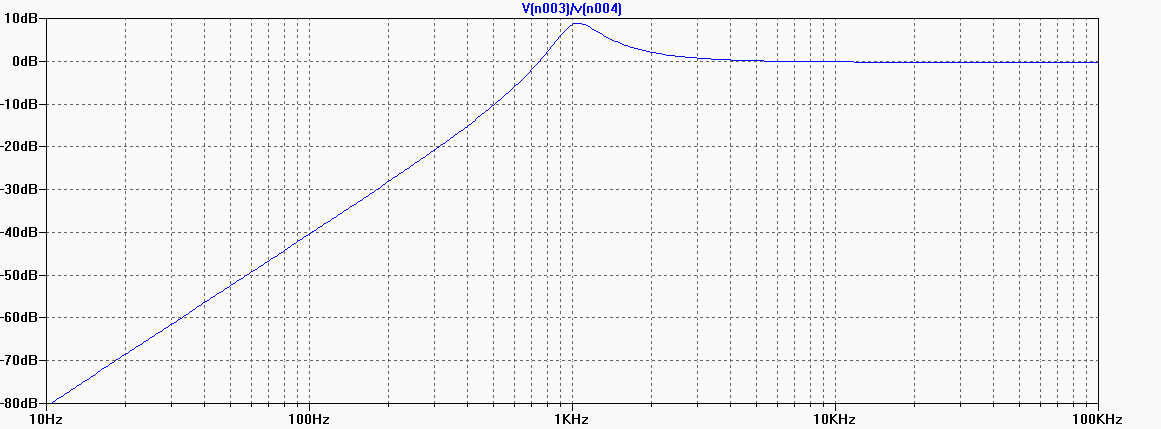
On peut par contre utiliser une simulation d'inductance à l'aide d'un transistor. C'est un montage connu et très simple. L'impédance équivalente s'écrit : L'inductance simulée s'écrit L=(Re+re).R.C, soit 31.8H avec 100, 470k et 100nF, re=Ut/Ic=577 Ohms sous 45µA. Cette inductance est en série avec R et re, cela définit le minimum de l'impédance atteint en dessous de 10Hz. Et elle est en parallèle avec R ET l'admittance de sortie du transistor (ro=h22-1=1380k @ 45µA pour une BC547C, ro s'écrit aussi Va/Ic c'est l'effet Early, voir wikipedia en Anglais). Une simulation sous LTspice IV montre facilement l'identité avec une inductance, ainsi que la relative stabilité en température. |
 |
 |
Par contre, l'inductance est fortement dépendante du courant Ic surtout lorsqu'il est faible. Une petite simulation le montre facilement. On voudrait controller l'inductance équivalente, il faudrait travailler avec un courant collecteur supérieur à 1mA, ce qui dans notre cas est impossible car cela va écraser le signal de la cellule.
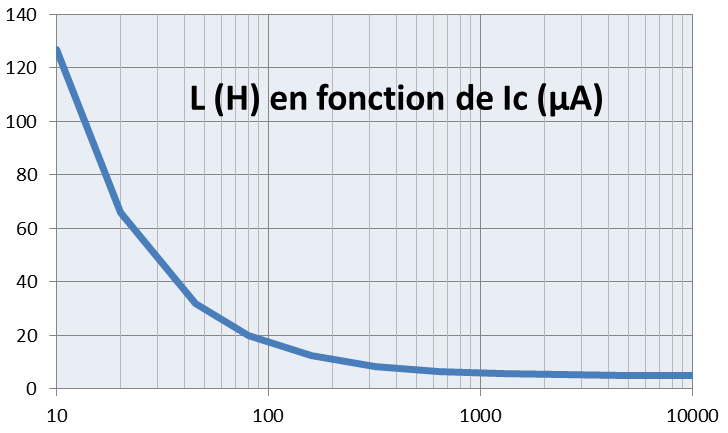 |
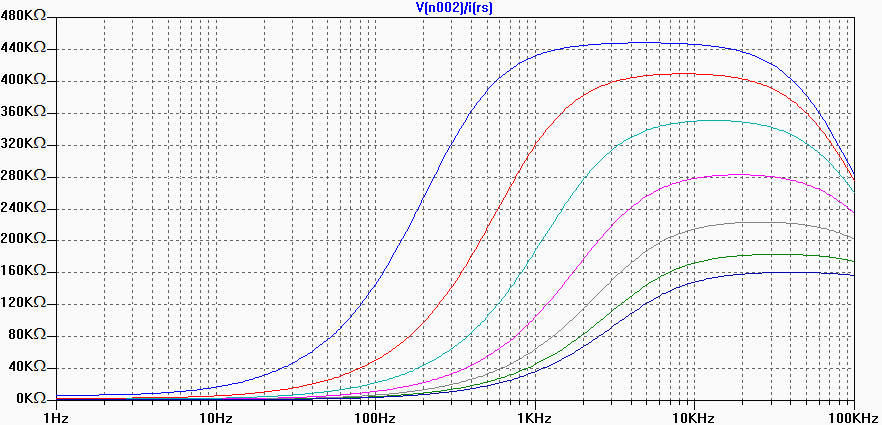
Simulation Zeq sous 10/22/45/100/220/450/1000 µA |
En fait, un tel dispositif non linéaire s'associe assez bien à une cellule IR. Dans l'obscurité, celle ci donnera un courant minimal, l'inductance équivalente et l'impédance maximale seront fortes donnant ainsi un gain maximal. A contrario, en cas d'éclairement parasite très fort, le dispositif va présenter une impédance plus faible ce qui va reculer la saturation. En fait, avec une telle charge, l'étage d'entrée ne saturera jamais. il faudra régler cette charge pour que le signal utile passe correctement, même en cas de parasite fort.
Ici, on choisit de travailler à 2kHz, avec une charge de 100µA maximum en continu, donc R1=470k, C1=100n ou 180n ou 220n, R2=100.
L'inductance simulée ne suffira pas à éliminer totalement les parasites 100Hz, il nous faut un filtre.
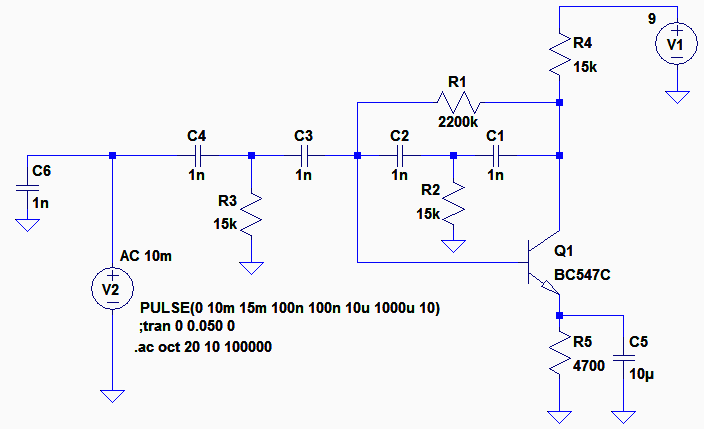
La première idée est celle d'un filtre passe bande, avec une structure simple dite en contre réaction simple, réalisable avec un seul transistor et avec laquelle on peut atteindre des facteurs Q moyens (tout est relatif).
 |
 |
Si R1=R2=R et R.C1=R3.C3/2, la fonction de transfert s'écrit
avec T2=2.R.C2, T1=R.C1/2, c'est un transfert passe bande du 2ème ordre avec :
En partant de F0,Q et R :
Puis on choisit R3, et on obtient :
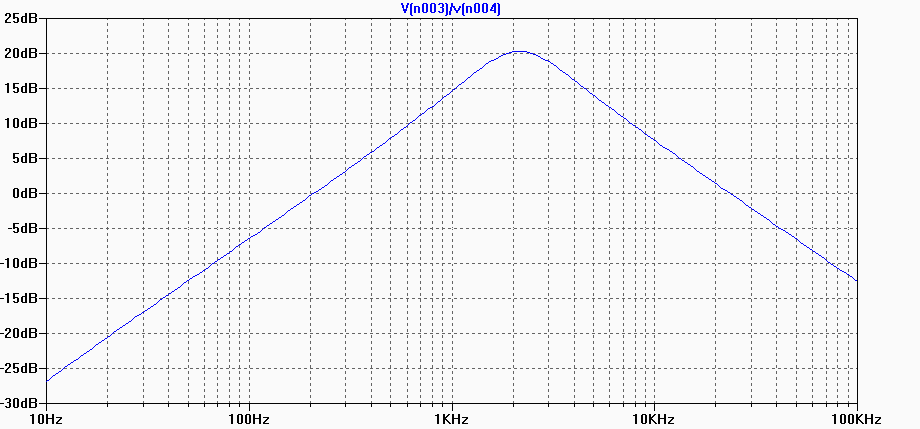
Les valeurs sur le schéma ci dessus donnent F0=2000, Q=3, A>10, mais l'attenuation relative du 100Hz n'est que de 30dB.
Pour aller au delà, il faut utiliser un filtre passe haut à fort Q.
 |
 |
Avec un tel filtre, on arrive à 50dB d'attenuation relative du 100Hz.
 en chantier
en chantier
L'émission utilise une LED IR à 950nm, par exemple CQY89 (25° d'ouverture), LD271 (<25°) ou LD274 (<10°) avec une préférence pour les LED de faible ouverture (LD274), sous un courant compris entre 10mA et plusieurs centaines de mA voire quelques ampères. Evidemment on peut en mettre plusieurs en série, par exemple 2 avec une alimentation 5V sous 100mA, mais une seule sous 1A !
Le rapport cyclique n'est pas forcément égal à 50% (la norme de télécommande RC5 par exemple, spécifie un rapport cyclique de 25%). On a intérêt de faire passer beaucoup de courant afin d'avoir une forte intensité lumineuse, et donc aller vers des valeurs basses voire très basses, pour abaisser la consommation tout en maintenant une portée correcte.
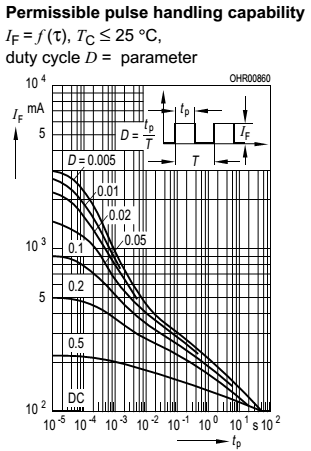 |
Une LED du genre LD271/LD274 présente les caractéristiques ci-contre.
En continu, la LED n'accepte pas plus de 100mA. Mais en considérant un rapport cyclique de 50%, soit un signal carré, le courant maximal passe à 300mA. Avec 25%, on monte à 700 mA, et avec 1% et 10µs (BFT Cellula130), on est à 2.5A juste inférieur à 2.5A max (LD271) ou 2A max (LD274). |
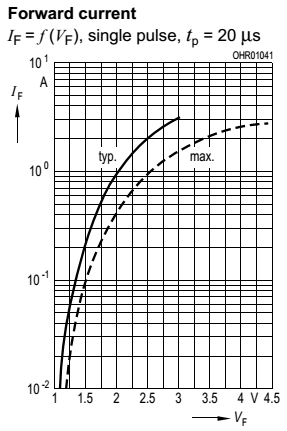 |
Avec un courant de 300mA, la tension LED est entre 1.6 et 1.9 Volts. Avec 700mA, on passe à 1.8 - 2.2 Volts. Avec 3A, on passe à 3.0 - 4.5 Volts. Ici on retrouve le dimensionnement des BFT Cellula 130, en série avec 11/4Ohms, sous 9V avec un BD139 en driver et un réseau 47/2Ohms+220µF. Le courant LED est autour de 1.7A théorique pour 1,3A mesurés. Ce courant pourrait être supérieur avec un autre transistor offrant un meilleur Vce sat comme un BD235/237 ou bien encore un HexFET genre IRF530. |
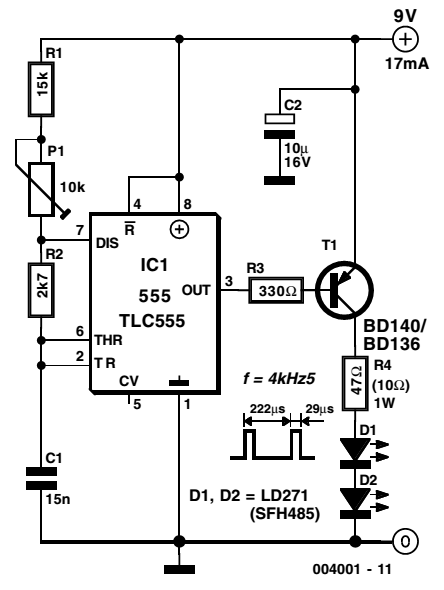
Dans le cas d'une barrière lumineuse à longue portée, asynchrone, l'émetteur est autonome, délivre une émission continue de l'ordre du kHz avec un rapport cyclique très faible, et doit supporter une gamme de température importante (-25/+55°C)
On imagine immédiatement utiliser un oscillateur 555 avec un HexFET canal P en sortie.
On peut aussi faire l'effort de concevoir une oscillateur à transistors, comme l'émetteur du BFT Cellula 130. Cet oscillateur est connu sous le nom de oscillateur complémentaire à relaxation. Initialement concu autour d'une paire NPN-PNP, on peut l'améliorer en utilisant un HexFET canal N en sortie pour avoir un courant LED IR plus stable en température.
 |
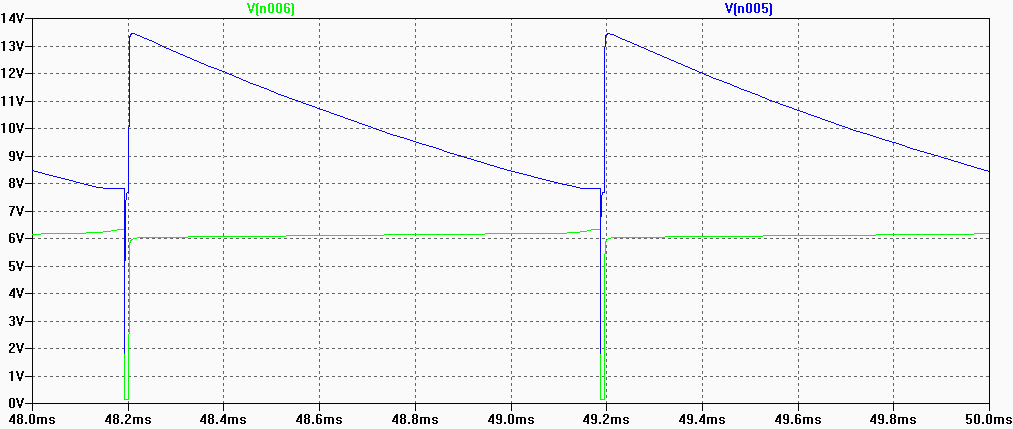 |
La fréquence est à ~0.77R2C2, soit 1kHz avec les valeurs du schéma. La durée de l'impulsion est ~R3C2, soit ici 10µs.
Avec R1=3.3 le courant crête dans la LED IR est de 1.4A, moyen consommé est exactement 1/100 du courant pic LED IR, soit 14mA. Avec R1=1.6 Ohms, on monte à 2A crete, tout çà en supposant que C3 est parfaite, sans résistance équivalente. Evidemment ce n'est pas vrai. Il faudra prendre un modèle faible ESR, ou en mettre plusieurs en parallèle.
Attention, pas question de faire passer 2A crete dans une résistance de 1/4W, il faudra en mettre plusieurs en parallèle pour réaliser R1.
La stabilité en fréquence est bonne, +/-5% entre -25 et +55°C.
On peut aussi utiliser un micro-contrôleur pour générer le signal, cela permet de contrôler parfaitement les instants d'émission et de pouvoir corréler les réceptions avec les émissions. C'est la solution de référence dans les architectures synchrones. Utiliser autre chose qu'un quartz semble hasardeux, car les oscillateurs RC, externes ou internes, fussent-ils calibrables (genre PIC12C508) ne peuvent pas garantir mieux que +/- 5% de précision. On pourrait envisager une procédure de calibration automatique en réglant la fréquence pour que le signal reçu soit maximal, mais cela introduit un mode supplémentaire à gérer, et ne garantit pas la stabilité sur une large gamme de température. L'utilisation d'un quartz est de loin beaucoup plus sûre.
Avec un PIC tournant à 4MHz, la période d'émission est mutliple de 1 µs, et donc les fréquences obtenues sont discrètes par pas de 3%. Donc on aura une erreur systématique au maximum de 1.5%, en plus de l'erreur de la fréquence d'horloge du CPU (négligeable avec un quartz). Par exemple, on ne pourra pas obtenir 36.00 kHz mais ce sera 35.71 ou 37.04 kHz. |
 |
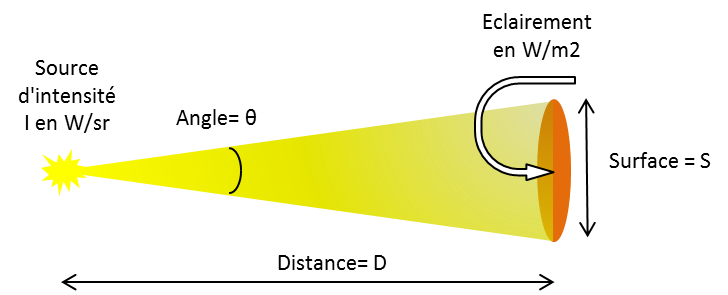
Le bilan de
liaisonSi une LED produit une intensité lumineuse I (par exemple 16mW/sr), sous un angle θ (par exemple 50°), l'éclairement correspondant à la distance D vaut E=2I/D²(1 - cos(θ/2))/sin(θ/2))²
Si l'angle est petit (<50°), la formule peut s'écrire beaucoup plus simplement E=I/D² en tolérant quelques pourcents d'erreur.
Une LED LD271 fournit 16mW/sr sous 100mA sur 50°, et donnera à 2.5m 2.7mW/m2.
Dans les mêmes conditions, une LED LD274 fournit 50mW/sr sur 25°, soit 8.1mW/m2, 3 fois plus qu'une LD274. On voit tout l'intérêt de prendre des LED à faible angle.
Si on utilise une lentille pour collimater le faisceau, l'éclairement va encore augmenter très sensiblement, bien sûr. Une LED IR comme la SFH4503 de Osram offre 4° de demi champ avec une intensité lumineuse de 250mW/sr typique, sa copine la SHF4502 offre 60mW/sr sur 18° de demi champ.
Les modules modernes de détection (TSOP17 et autres) affichent une sensibilité minimale à 0.35mW/m2 mais qui peut monter d'un facteur 10 selon l'ambiance lumineuse.
Dans le cas d'une barrière directe, on a de la marge, même sans lentille. On devrait même pouvoir baisser le courant de la LED IR d'un facteur 5 dans les meilleurs cas… l'expérience le montre, un prototype de barrière avec un TSOP1736 et une LED IR LD274 fonctionne bien à 25mA de courant pour une distance de 3m à l'intérieur (LED sur port IO PIC avec une résistance de 120 Ohms). Evidement les conditions sont là optimales, on est à l'intérieur, la température est autour de 20°C, et il y a peu de bruit lumineux. Un tel dimensionnement ne serait pas satisfaisant pour une conception robuste du genre qui marche de -25 à +55°C.
Système synchrone
à module IR intégréAvec un module détecteur TSOP17 ou TSOP18 ou équivalent, la détection se fait avec un retard de 7 à 15 périodes. Par sécurité on fera des salves de 20 à 24 périodes, avec une pause de même durée car il n'est pas nécessaire d'avoir une émission constante.
On convient de générer avec le micro controlleur, une salve IR, composée de 20 à 24 périodes F0, F0 étant la fréquence centrale du récepteur (probablement 36 kHz). Le rapport cyclique étant de 25% au sein de la salve. Chaque salve est suivie de la même durée de pause.On obtient ainsi un motif de 600 µs de signal à F0, suivis de 600 µs de pause, très proche du signal test. Dans ces conditions, le signal de sortie détecteur est évidemment fortement dépendant de la quantité de lumière reçue en retour, c'est à dire de la qualité et de la distance de la reflexion.
 |
 |
|
|
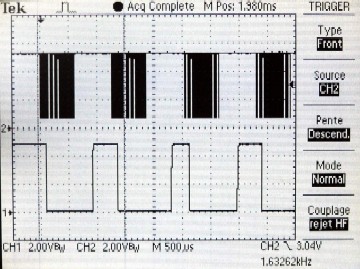
Détail de la détection, en présence d'une réflexion forte. Le temps de
réaction est très faible, le signal de détection devient actif en moins
de 6 périodes F0, temps minimal spécifié.
|
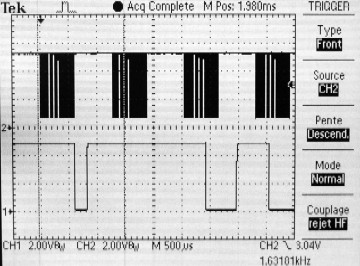
Si la réflexion est faible, le temps de réaction augmente grandement,
mais reste dans la gamme +7 à 15 /F0 spécifiés.
|
Si le récepteur est illuminé, on verra le signal détection passer à 0 entre le 7ème période et la 15ème période, en tout état de cause au moins sur les 8 dernières périodes si la salve fait 23 periodes de long (spec de détection à +15 périodes). Le signal détecté durera la durée du burst +/-6 périodes (données issue de la spécification d'un TSOP). Traduit en chronogramme, çà donne çà :

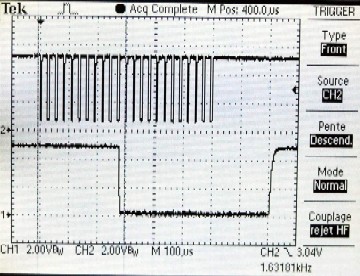
De façon pragmatique, l'émission est directement contrôlée par un microcontrolleur (Microchip PIC par exemple). Le/les LED IR sont allumées pendants Xµs (par exemple 6µs), puis on attend Yµs pour obtenir une période de signal (Y=21µs pour une période=27.7µs à 36kHz). Ceci est répété 24 fois, cela forme une salve de 660µs à 36kHz. Puis on attend 24 périodes sans rien faire, c'est la pause.
Le motif global fait donc 1.3ms, soit 770Hz à 36kHz. Pendant ce motif la/les LED IR sont allumées 24 fois 6µs, soit un rappport cyclique de 11%.
A chaque période envoyée, le PIC échantillonne la sortie du détecteur. A la fin d'un motif (48 périodes), au bout de 1.3ms, on dispose de 48 échantillons 0/1 soit 6 octets. On mesure (cas réel) :
On voit qu'un critère de détection positive pourrait être FFxx00 00xFFF, on peut durcir la détection en exigeant FFx000 00xFFF.
Une autre façon de faire est de compter le nombre de 1 au début du motif avant la détection, puis le nombre de 0 lorsque la détection a eu lieu, puis le nombre de 1 jusqu'à la fin de la salve, en distinguant les 4 phases du cycle.
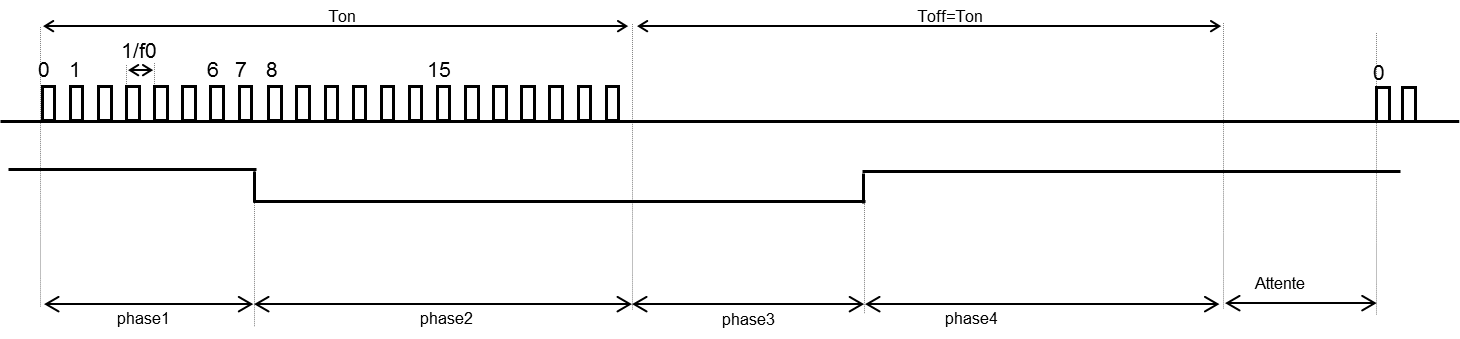
On mesure (cas réel) phase1;phase23;phase4 :
Le graphique suivant donne un ensemble de mesures réelles faites avec un écart de 3m entre l'émetteur (LD274) et le récepteur (TSOP1736) en modulant plus ou moins le canal de transmission.
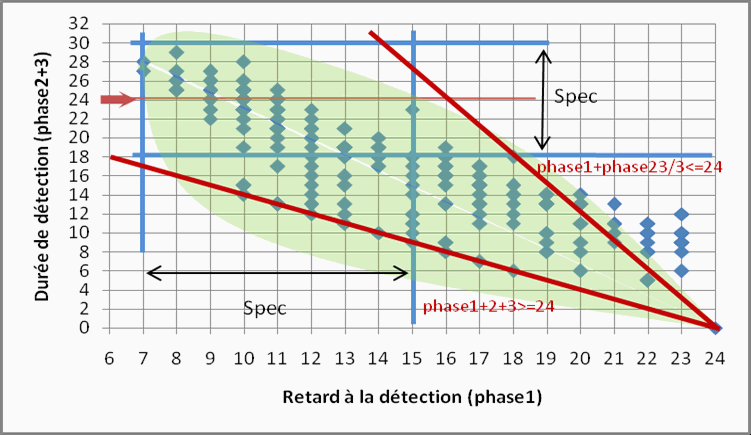
On constate que la durée de la détection n'est pas comprise entre 24 +/- 6/f0=18 à 30 comme le dit la spécification, mais s'étend de 6 à 29.
On constate aussi des points aberrants lorsque la détection est très faible (phase1>15), avec des retards de 21, 22 ou 23 périodes ; on ne devrait pas lire des durées d'impulsion de 8, 10 ou 12 périodes dans ces cas, et pourtant !
On tire de ce graphique issu de mesures réelles, les conditions de validité d'une détection :
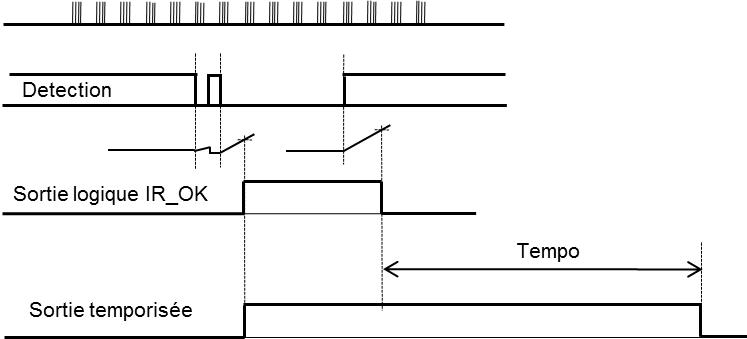
Pour sécuriser la détection, on applique ensuite un filtre temporel, qui consiste à activer l'état logique « IR_OK » si le signal détection est actif pendant un certain nombre de cycles, de même pour la désactivation.
| Type de faisceau | Normalement Obturé | Normalement Passant |
| Réflexion | •Robinet optique
•Interrupteur de proximité ==> ON sécurisé, temporisé |
•détection d'absence ?
==> OFF sécurisé |
| Transmission | •Détection d'absence ?
==> OFF sécurisé |
•Portail protégé à la fermeture
•Rideau métallique, protégé à la descente. •Avertisseur de passage. ==> OFF sécurisé, pas de tempo |
Pour sécuriser ce processus de détection, on utilise 4 salves consécutives. Si les quatre salves présentent toutes les quatre, un critére de détection positif, alors on décide qu'on a détecté une réflexion. Si les critères ne sont pas respectés une seule fois, alors on attendra la prochaine salve.
 |
 |
|
|
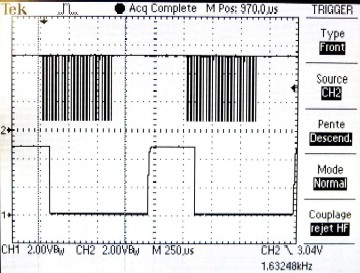
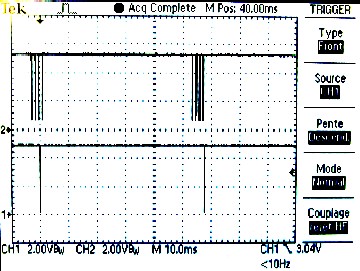
Les quatre salves (en haut) avec la sortie détection (en bas) en
présence d'une réflexion forte.
|
Les quatre salves (en haut) avec la sortie détection (en bas) en
présence d'une réflexion très faible.
|
Il n'est pas nécessaire de tirer continuellement des salves, il suffit de tirer les 4 salves toutes les 50 à 100 ms, pour avoir une détection suffisamment rapide pour la majorité des applications.
Avec ce type de cadencement, le courant moyen consommé par la LED IR devient insignifiant. Dans notre cas (4 salves, 23 périodes par salve 37kHz, 25%, 55 ms de répétition), le courant moyen est le millième du courant qui passe dans la LED IR. Noter qu'on peut aussi sortir une information relative au niveau d'interférence, car il y a des endroits où on ne doit rien recevoir, quelque soit l'état de la réflexion du faisceau. Il s'agit des premiers et derniers instants de la salve, pendant la durée de Phase1. |
 |
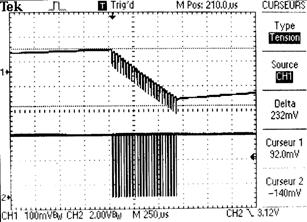
Si on souhaite faire fonctionner ce type de montage avec des LED IR sous forts courant, il faut prendre beaucoup de précautions au niveau des interférences conduites (et rayonnées) qui peuvent agir sur le module de détection. Les LED IR seront contrôlées par un FET type BS170 (jusqu'à un courant crête de 400mA) ou un HexFet type IRF530 ou BUZ11 (pour un courant d'un ampère par exemple) en puisant l'énergie dans une capacité, elle même bien découplée de l'alimentation.
En partant sur 24 pulses de 6µs à 36kHz, la durée d'une salve est de 660µs et la durée d'illumination est de 144µs. Avec un courant dans la LED de 150mA (BS170 et 15 Ohms en série), cela représente une quantité d'électricité Q=I*t est de 22µC. Cette quantité d'électricité sortie d'une capacité d'une capacité de 100µF provoque une chute de tension est inférieure à 0.22V (dV=Q/C). On mesure au scope dV = 232mV c'est cohérent. |
|
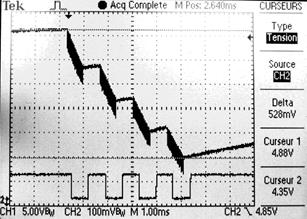
La durée de 4 salves en série, représente une durée totale de 5,2ms, et une durée d'illumination de 432µs. Avec un courant moyen de 130mA à peu près constant, la quantité d'électricité Q=I*t est de 56µC. Cette quantité d'électricité sortie d'une capacité d'une capacité de 100µF provoque une chute de tension est inférieure à 0.56V (dV=Q/C). On mesure au scope dV = 528mV c'est cohérent. |
|
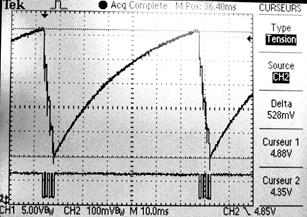
La capacité doit se recharger pendant la durée de pause, si on prend un cycle à 50-70ms, il faudra un courant de 0.43mA moyen pour revenir à la tension nominale, une résistance de 330Ohms donne des résultats satisfaisants. |
|
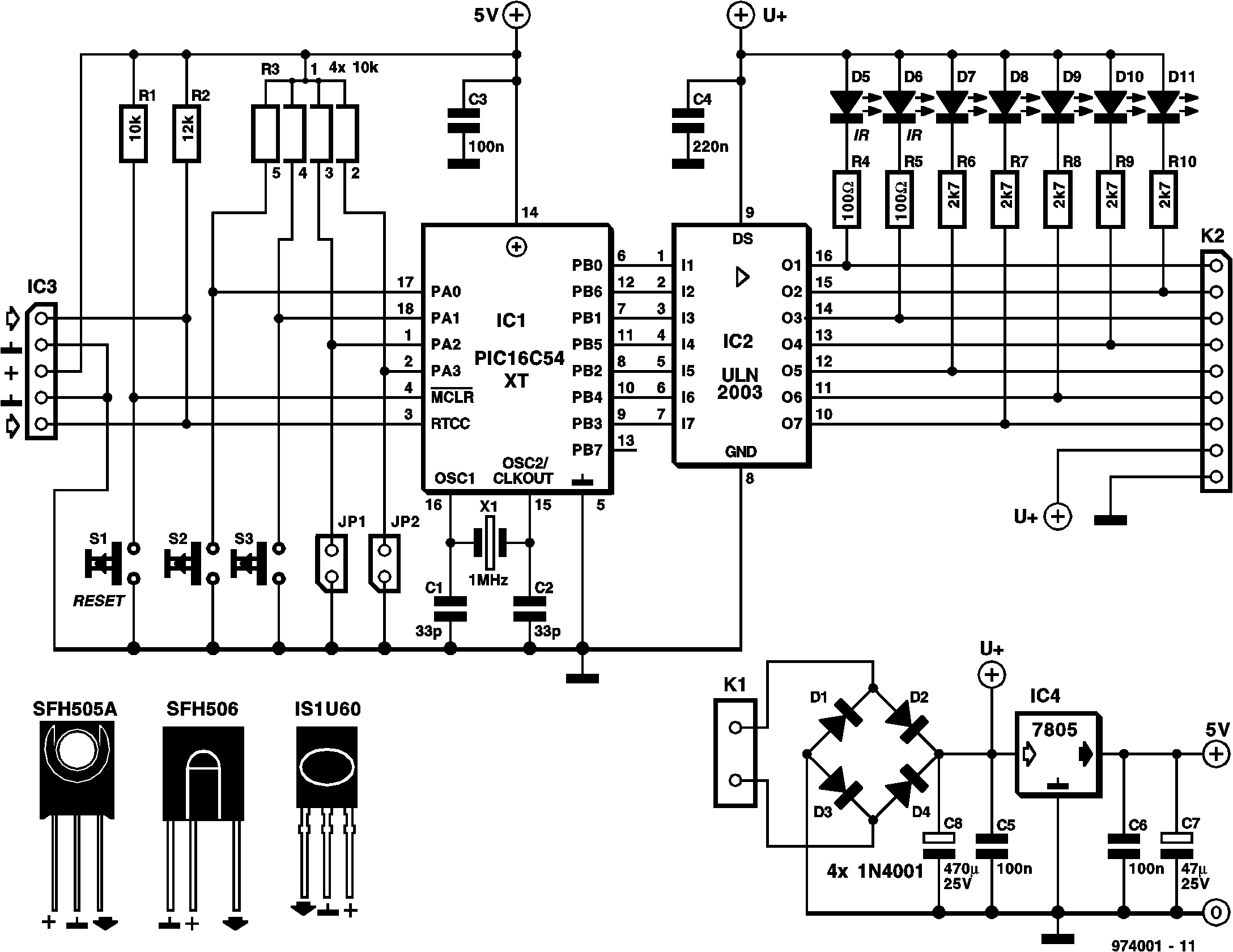
Un port IO d'un microcontrôleur PIC est capable de piloter une charge avec 25mA maximum absolu. La résistance équivalente de la sortie est de moins de 30 Ohms pour une charge connectée au Vdd (sink current, temp=85°C) est supérieure à 120 Ohms pour une charge connectée au Vss (source current, temp=85°C) ; cette résistance augmente avec la température, c'est un gage de stabilité.
En connectant plusieurs ports de sortie en parallèle, on multiplie le courant de LED pour le nombre de ports (à peu près, ce n'est pas linéaire). 8 ports en parallèle avec chacun 120 Ohms, revient à peu près au même qu'un BS170 avec 15 Ohms((120+30)/8 Ohms contre (15+4.4) Ohms), pour bien moins cher.
Une telle solution peut aussi évoluer vers un éclairage séquentiel de zone (Cf, article Elektor), voire une adaptation du courant LED aux conditions locales.
Avec les précautions prises la consommation est vraiment très faible.
Ce montage est destiné à 2 grandes applications :
•Autonome (robinet), alimenté après un transformateur, ou directement sur le secteur
•En capteur d'une centrale existante (portail, volet, rideau), alimenté par la centrale, en général c'est du 24V continu, qui peut en fait monter allègrement à du 34V (vécu).
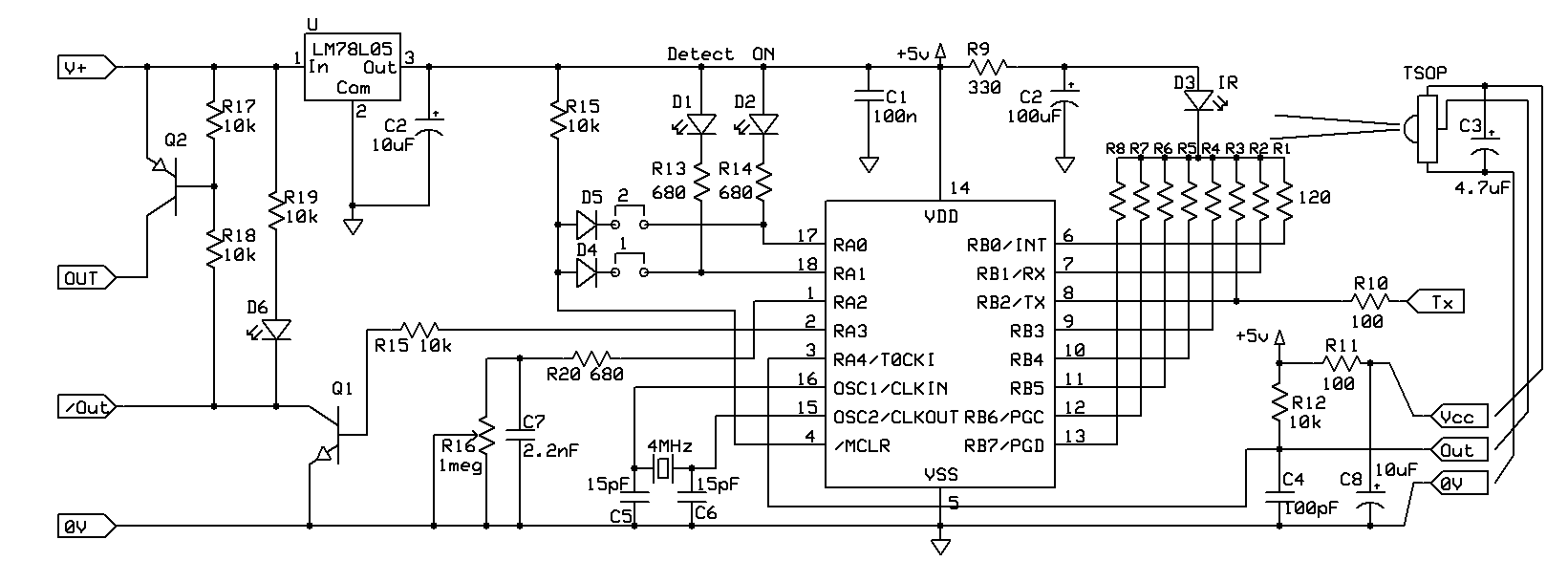
Il faut prévoir une sortie NO et une sortie NC. Soit utiliser un relais bistable, soit 2 transistors.
 |
Le schéma est simple et direct. Il a été conçu pour un PIC16C84/F84/F84A, mais dans le but d'être à terme compatible d'un portage sur PIC12C508/C509. Les LED sont directement alimentées par le PIC en profitant de l'excellente capacité en courant des sorties au niveau bas. Dans cet état, chaque sortie présente une résistance équivalente de l'ordre de 33 Ohms, jusqu'à des courants de l'ordre de 50 mA.
|
La consommation totale est très faible :
|
détection
|
CPU
|
LED IR
|
LED ON
|
LED détection
|
TOTAL
|
|
| typique |
0.5 mA
|
1.8 mA
|
0
|
1 mA
|
0
|
3.3 mA
|
| max |
1 mA
|
4.5 mA
|
50 µA
|
3 mA
|
20 mA
|
28.5 mA
|
Avec un courant de l'ordre de 25mA (RL=120 Ohms), la détection d'une main se fait à 30cm, en montant autour de 50mA (RL=33 Ohms), on arrive à 50 cm.
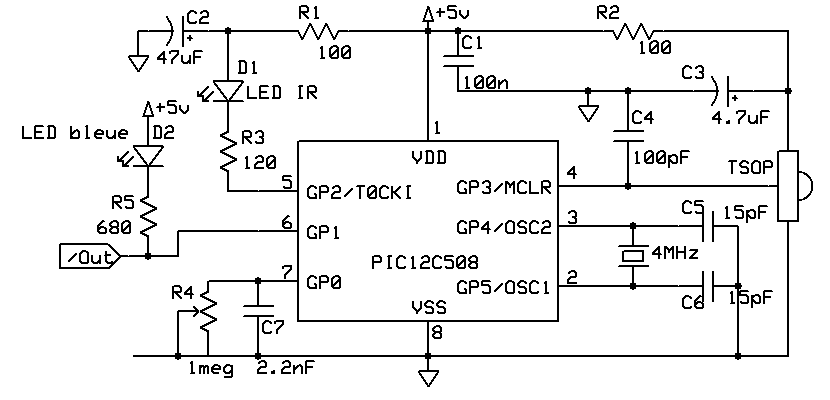
Version PIC12C508, très compacte, pour les applications en reflexion (genre robinet).
Version PIC16F628 pour les applications en transmission (genre barriere de sécurité portail roulant).
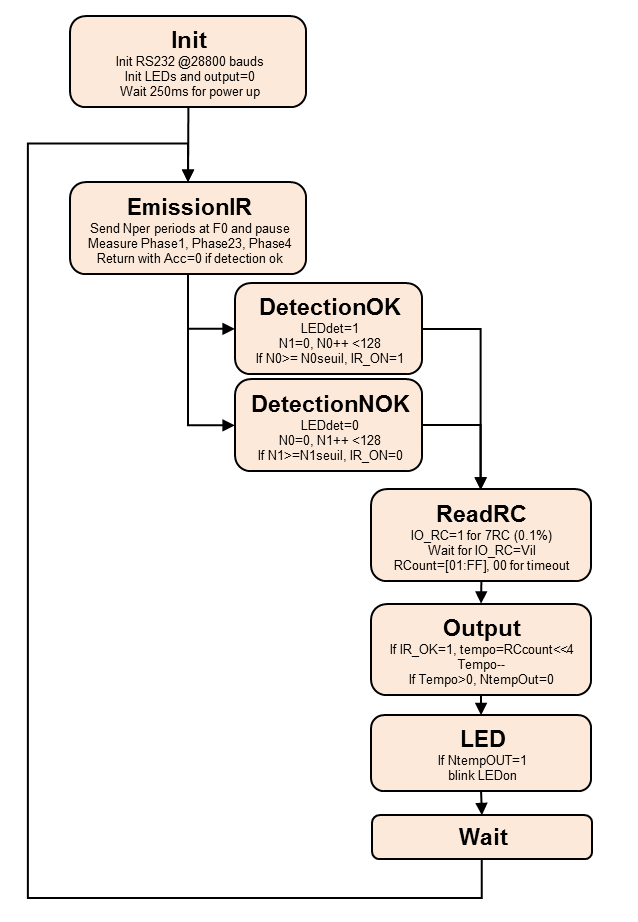
Le logiciel est assez simple, on a néanmoins pris des précautions afin qu'il soit très robuste.
 |
 |
Article EDN janvier 2001 : http://www.edn.com/contents/images/11801di.pdf
Forum http://www.diyaudio.com/forums/showthread/t-25884.html
*Typ RED GaAs LED: Vf=1.7V Vr=4V If=40mA trr=3uS
.MODEL LED1 D (IS=93.2P RS=42M N=3.73 BV=4 IBV=10U CJO=2.97P VJ=.75 M=.333 TT=4.32U)
*Typ RED,GREEN,YELLOW,AMBER GaAs LED: Vf=2.1V Vr=4V If=40mA trr=3uS
.MODEL LED2 D (IS=93.1P RS=42M N=4.61 BV=4 IBV=10U CJO=2.97P VJ=.75 M=.333 TT=4.32U)
*Typ BLUE SiC LED: Vf=3.4V Vr=5V If=40mA trr=3uS
.MODEL LED3 D (IS=93.1P RS=42M N=7.47 BV=5 IBV=30U CJO=2.97P VJ=.75 M=.333 TT=4.32U)